
構成
1. 永久磁石DCモーター:
ステータ極、ローター、ブラシ、ケーシングなどから構成されます。
ステータ極は永久磁石(永久磁石鋼)で作られており、フェライト、アルニコ、ネオジム、鉄、ボロンなどの材料で作られています。構造形式によって、円筒型やタイル型などいくつかの種類に分けられます。
回転子は一般に積層シリコン鋼板で作られ、回転子コアの2つのスロットの間にエナメル線が巻かれ(3つのスロットに3つの巻線がある)、接合部は整流子の金属板にそれぞれ溶接されている。
ブラシは、電源と回転子巻線を接続する導電部品であり、導電性と耐摩耗性の2つの特性を備えています。永久磁石モータのブラシには、単層金属板ブラシ、金属グラファイトブラシ、電気化学グラファイトブラシが使用されています。
2. ブラシレスDCモーター:
永久磁石ロータ、多極巻線ステータ、位置センサなどで構成されています。ブラシレスDCモータはブラシレスを特徴とし、半導体スイッチング素子(ホール素子など)を用いて電子整流を実現しています。つまり、従来の接触整流子とブラシを電子スイッチング素子に置き換えたものです。高い信頼性、整流スパークなし、機械ノイズが少ないなどのメリットがあります。
位置センサは、ロータ位置の変化に応じて、ステータ巻線の電流を一定の順序で整流します(つまり、ステータ巻線に対するロータ磁極の位置を検出し、決定された位置で位置検出信号を生成し、信号変換回路で処理されてから取り出されます。電源スイッチ回路を制御し、一定の論理関係に従って巻線電流を切り替えます)。

2. ブラシレスDCモーター:
永久磁石ロータ、多極巻線ステータ、位置センサなどで構成されています。ブラシレスDCモータはブラシレスを特徴とし、半導体スイッチング素子(ホール素子など)を用いて電子整流を実現しています。つまり、従来の接触整流子とブラシを電子スイッチング素子に置き換えたものです。高い信頼性、整流スパークなし、機械ノイズが少ないなどのメリットがあります。
位置センサは、ロータ位置の変化に応じて、ステータ巻線の電流を一定の順序で整流します(つまり、ステータ巻線に対するロータ磁極の位置を検出し、決定された位置で位置検出信号を生成し、信号変換回路で処理されてから取り出されます。電源スイッチ回路を制御し、一定の論理関係に従って巻線電流を切り替えます)。
3.高速永久磁石ブラシレスモーター:
ステーターコア、磁性鋼製ローター、サンギア、減速クラッチ、ハブシェルなどで構成されています。モーターカバーには速度測定用のホールセンサーを取り付けることができます。
ブラシ付きモーターとブラシレスモーターの比較
ブラシ付きモーターとブラシレスモーターの通電原理の違い:ブラシ付きモーターはカーボンブラシと整流子によって機械的に整流されます。ブラシレスモーターは誘導信号に基づいてコントローラーによって電子的に整流されます。
ブラシ付きモーターとブラシレスモーターは電源供給原理が異なり、内部構造も異なります。ハブモーターの場合は、モータートルクの出力モード(ギア減速機構による減速の有無)が異なり、機械構造も異なります。
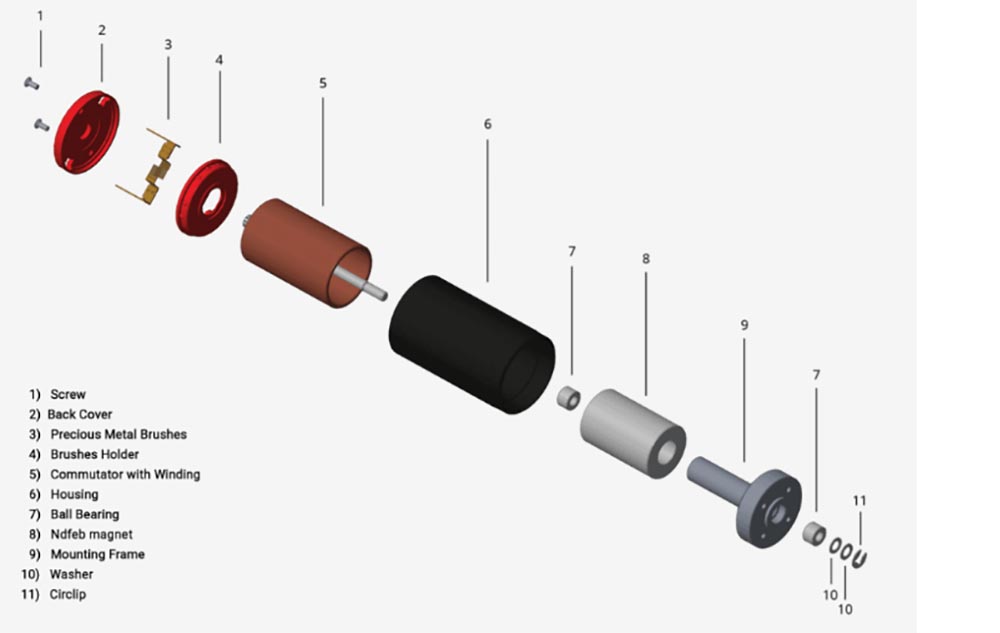
コアレスブラシ付きDCモーター
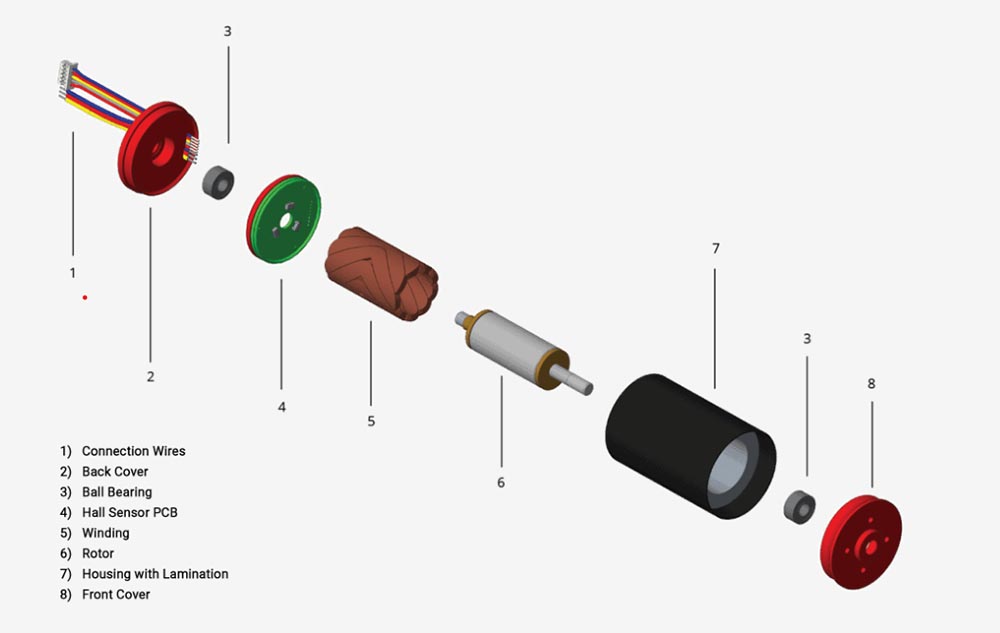
コアレスブラシレスDCモーター
投稿日時: 2019年6月3日