
2.1 モータ構造におけるベアリングとその機能
一般的な電動工具の構造には、モーターの回転子(シャフト、回転子コア、巻線)、固定子(固定子コア、固定子巻線、接続箱、エンドカバー、ベアリングカバーなど)、接続部品(ベアリング、シール、カーボンブラシなど)などの主要部品が含まれます。モーター構造の各部品の中には、軸とラジアル荷重を受ける部品もありますが、内部で相対運動をしない部品もあります。また、軸とラジアル荷重を受けない部品もあります。ベアリングだけが、内部で相対運動(内輪、外輪、転動体に対して)しながら、軸とラジアル荷重の両方を受けます。したがって、ベアリング自体はモーター構造の繊細な部品です。これは、産業用モーターにおけるベアリングレイアウトの重要性も決定します。
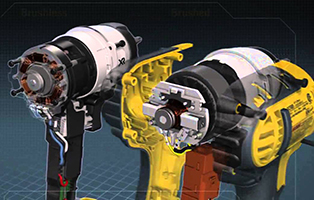
電動ドリルの解析図
2.2 モータにおける転がり軸受レイアウトの基本手順
電動工具用モーターにおける転がり軸受の配置とは、エンジニアが電動工具用モーターの構造を設計する際に、シャフト系に様々な種類の軸受をどのように配置するかというプロセスを指します。モーターの軸受配置を正しく行うには、以下の点を考慮する必要があります。
最初のステップ:工具における転がり軸受の動作状態を理解すること。これには以下が含まれます。
- 水平モーターまたは垂直モーター
電動ドリル、電動のこぎり、電動ピック、電動ハンマーなど、様々な電動工具を用いた電気工事では、モーターのベアリングの取り付け状態(垂直方向と水平方向)を確認してください。荷重方向はモーターによって異なります。水平方向のモーターでは重力はラジアル荷重となり、垂直方向のモーターでは重力はアキシャル荷重となります。これは、モーターのベアリングの種類とベアリング配置の選択に大きく影響します。
- モーターの必要な速度
モーターの速度要件は、ベアリングのサイズとベアリングの種類の選択、およびモーター内のベアリングの構成に影響します。
- ベアリング動荷重の計算
モーターの回転速度、定格出力/トルクなどのパラメータに応じて、(GB/T6391-2010/ISO 281 2007)を参照してボールベアリングの動荷重を計算し、適切なサイズのボールベアリング、精度等級などを選択します。
- その他の要件:軸方向チャネリング要件、振動、騒音、防塵、フレームの材質の違い、モーターの傾きなど。
つまり、電動工具モーターベアリングの設計と選択を開始する前に、モーターの実際の動作条件を包括的に理解して、モーターの合理的かつ信頼性の高い選択を確実に行う必要があります。
ステップ 3: ベアリングの種類を決定します。
最初の 2 つのステップでは、選択した固定端と浮上端の軸受荷重と軸システム構造を考慮し、軸受特性に応じて固定端と浮上端に適切な軸受タイプを選択します。
3. 典型的なモータベアリングレイアウトの例
モーターベアリングのレイアウトには様々な種類があり、一般的に使用されるモーターベアリングの構造は、取り付け方法や構造も多岐にわたります。以下は、最も代表的なダブル深溝玉軸受の構造を例に挙げています。
3.1 ダブル深溝玉軸受構造
ダブル深溝玉軸受構造は、産業用モーターにおいて最も一般的な軸構造であり、その主軸支持構造は2つの深溝玉軸受で構成されています。2つの深溝玉軸受は互いに軸受けし合います。
下の図に示すように:
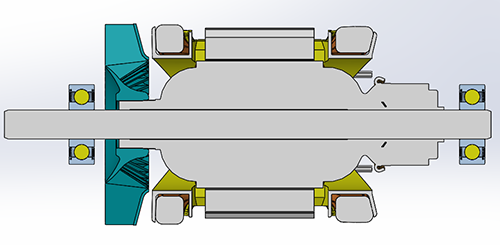
ベアリングプロファイル
図において、軸延長端ベアリングは位置決め端ベアリングであり、軸延長端ではないベアリングは浮動端ベアリングです。ベアリングの両端は軸系のラジアル荷重を支え、位置決め端ベアリング(この構造では軸延長端に配置)は軸系のアキシアル荷重を支えます。
通常、この構造のモータ軸受配置は、モータの軸方向ラジアル荷重が大きくない場合に適しています。マイクロモータ構造の負荷結合によく使用されます。
投稿日時: 2023年6月1日